
RoboSoft2023:堀岡 悠人さんが単一モータで駆動する双安定格子の変形波伝搬を利用したイモムシロボットを発表
当研究室でM1の堀岡 悠人さんの研究が,世界中のソフトロボット研究者が集う国際学会IEEE RoboSoft2023(The 6th IEEE-RAS International Conference on Soft Robotics) に口頭発表セッションに採択され,学会会場(シンガポールのMarina Bay SandsのExpo and Convention Centre)にて英語での15分の口頭発表を行いました.この学会ではプログラムを見ていただくとわかるように,ほとんどの採択者がポスター発表で,口頭発表者として採択される研究はごく僅かです.この研究が口頭発表セッションに選ばれたことから,堀岡 悠人くんの研究が高く評価されていることが分かります.

下記が発表情報にになります:
A Crawling Robot That Utilizes Propagation of Deformation Waves of a Bistable Lattice Actuated by a Single Motor, Horioka, Yuto, Shimizu, Masahiro, Umedachi, Takuya, The 6th IEEE-RAS International Conference on Soft Robotics (RoboSoft2023), Paper Tu_Or1P, 2023 (pdfのリンクは発表され次第リンクを付けます).
邦訳「単一モータで駆動する双安定格子の変形波伝搬を利用したイモムシロボット」,堀岡 悠人,清水 正宏,梅舘 拓也
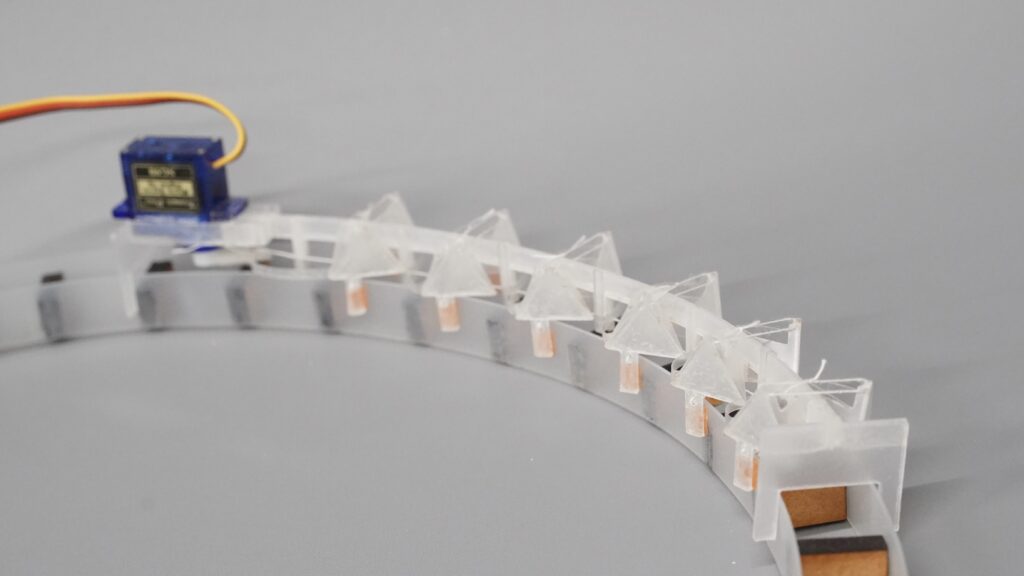
発表概要:本研究では,双安定構造を数珠つなぎにした格子構造を用いて,単一のアクチュエータで駆動し這行するイモムシ型ソフトロボットを提案した.双安定格子を伝った変形波の伝搬により,このロボットは単一のアクチュエータで這行運動を実現する.本研究では,2つの安定状態間のエネルギー差を持つ双安定構造と,リセット機構により,繰り返し波の伝搬が可能となった.また,ロボットの背骨に当たる構造を柔らかく設計する,曲がったレールに沿って這行運を行うことができることも示した.ロボット実機(試作機)の実験結果から,直線,曲線,登り斜面のレールの上を移動可能であることを示した.
口頭発表の練習のため収録した発表動画と,PV動画をYoutubeに公開しました:
堀岡 悠人さんは,当日英語で見事発表を完遂し,その発表に対して「非常に面白かった」というコメントや,数多くの質問が寄せられました.素晴らしい発表でした.お連れ様でした.
当研究のまとめページはこちら現在作成中です.

