
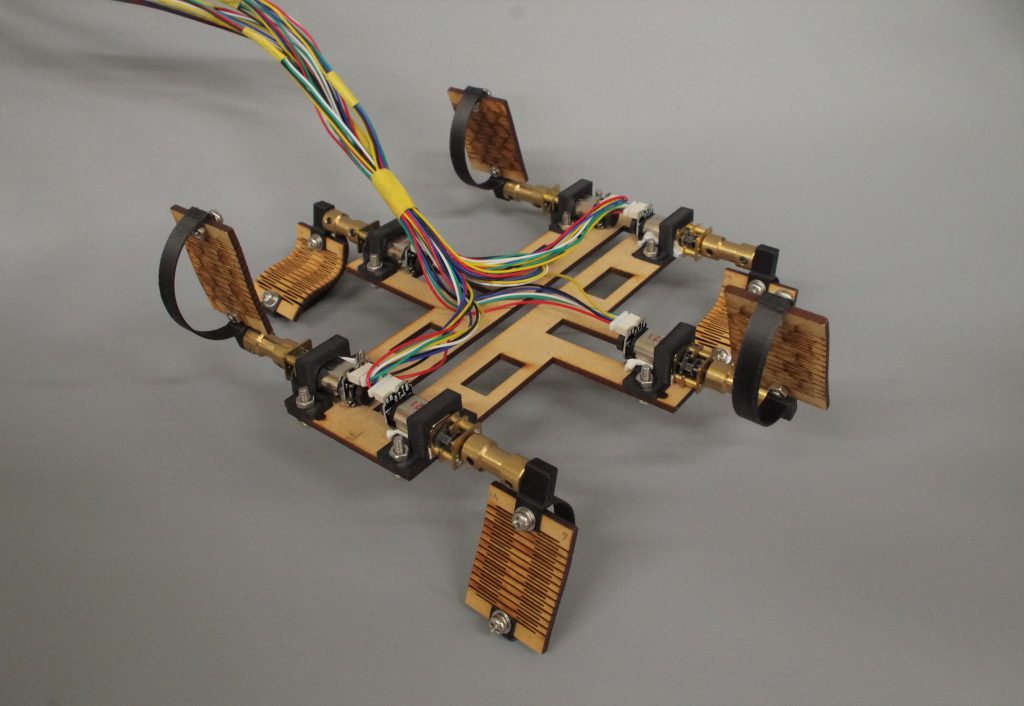
柔らかい脚を使用した脚型ロボットは,動物の脚の硬さを基にして設計をしている研究が主流でした.本研究では,脚が路面から受けた力を,弾性エネルギとして蓄え,推進力に変換するように,脚の形状と硬さを設計しました.始めに,地面を蹴るのに適した形状を考えてから,シミュレーションと最適化アルゴリズムを用いて,最も多くの弾性エネルギを蓄えるような硬さを求めました.求めた硬さになるように,実際に脚を作製し,この脚を使うと,従来より最大1.9倍速度が向上することを実機実験で示しました.提案した脚は,3Dプリンタで造形した部品と,木材にレーザ加工機で切れ込みを入れ,柔軟にした部品から構成されています.
本研究は,当研究室の金子温志さんが行なっています.本研究は下記学会で発表しました:
Conversion of Elastic Energy Stored in the Legs of a Hexapod Robot into Propulsive Force, Atusushi Kaneko, Masahiro Shimizu, and Takuya Umedachi, The 11th International Conference on Biomimetics and Biohybrid Systems (Living Machines 2022), July 20, 2022.
タイトル:脚に生じる水平方向の弾性力を推進に活かした多脚ロボット
著者:金子温志,伊與部聡,梅舘拓也,ロボティクス・メカトロニクス 講演会 2020, G11-2