
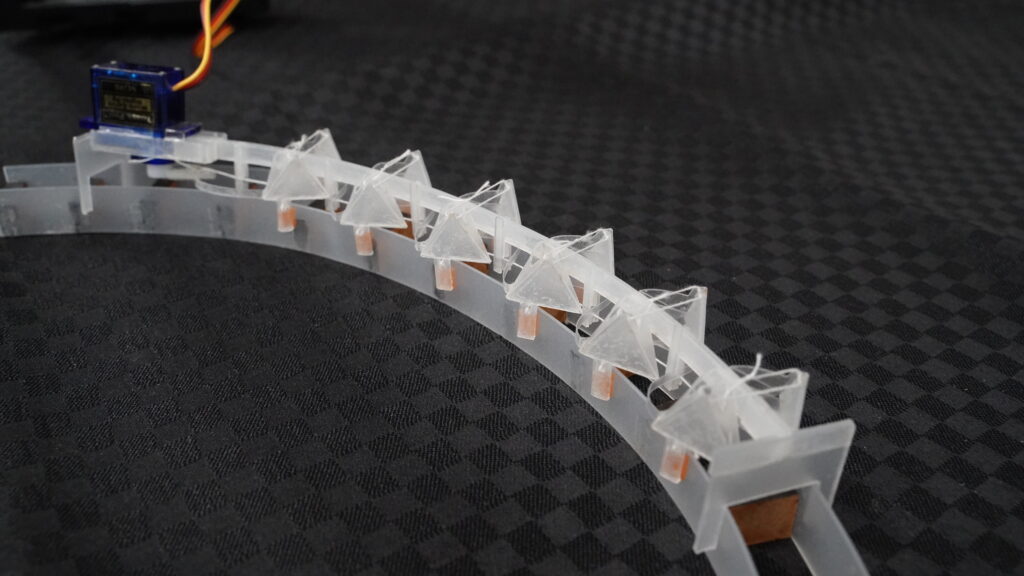
本研究では,双安定構造を数珠つなぎにした格子構造を用いて,単一のアクチュエータで駆動し這行するイモムシ型ソフトロボットを提案しました.双安定構造とは,2つの力学的に安定な変形形状を持つ構造です.本研究では,それら双安定構造を多数バネで直列につなぎ作成した双安定定格子を活用することで,たった一個のモータで這行(しゃこう)に必要な,多数の足を後ろから順番に離し,前に移動させ,地面を把持するといった複雑な動作を設計することに成功しました.具体的には,2つの安定状態間のエネルギー差を持つ双安定構造と,リセット機構により,繰り返し変形波の伝搬が可能となり,這行運動を生成できることを示しました.また,ロボットの背骨に当たる構造を柔らかく設計することで,曲がったレールに沿って這行運を行うことができることも示しました.ロボット実機(試作機)の実験結果から,直線,曲線,登り斜面のレールの上を移動可能であることを示しました.
成果発表
本研究は,堀岡 悠人さんが中心に行ったものです.本研究は,下記の学会で発表しました:
A Crawling Robot That Utilizes Propagation of Deformation Waves of a Bistable Lattice Actuated by a Single Motor, Horioka, Yuto, Shimizu, Masahiro, Umedachi, Takuya, The 6th IEEE-RAS International Conference on Soft Robotics (RoboSoft2023), Paper Tu_Or1P, 2023
米国電気学会(IEEE)が開催するソフトロボットの国際学会RoboSoft2023(The 6th IEEE International Conference on Soft Robotics)にて,堀岡 悠人さんが学会会場であるシンガポールのMarina Bay SandsのExpo and Convention Centreにて英語での15分の口頭発表を行いました.この学会ではプログラムを見ていただくとわかるように,ほとんどの採択者がポスター発表で,口頭発表者として採択される研究はごく僅かです.この研究が口頭発表セッションに選ばれたことから,堀岡 悠人くんの研究が高く評価されていることが分かります.本動画はその研究の英語発表を再現したものです: