
IROS2022に小野寺智哉さんの研究が採択されました
当研究室でM2の小野寺智哉さんの研究が,ロボット系ではトップカンファレンスのIROS2022(The 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems)に採択されました:
- In-hand Manipulation Exploiting Bending and Compression Deformations of Caterpillar-Locomotion-Inspired Fingers, Tomoya Onodera, Noriyasu Iwamoto, Takuya Umedachi, The 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2022), Oct. 2022 (accepted).
イモムシって曲げ変形だけじゃなく,体軸方向にも伸び縮みしながら這行(しゃこう)運動するんです(参考動画)が,それを模擬したイモムシ型ソフトロボットで「指」を作ったら,モノを持ったまま手の中で移動,回転できんじゃね?というアイディアをもとに作ったロボットハンドです!
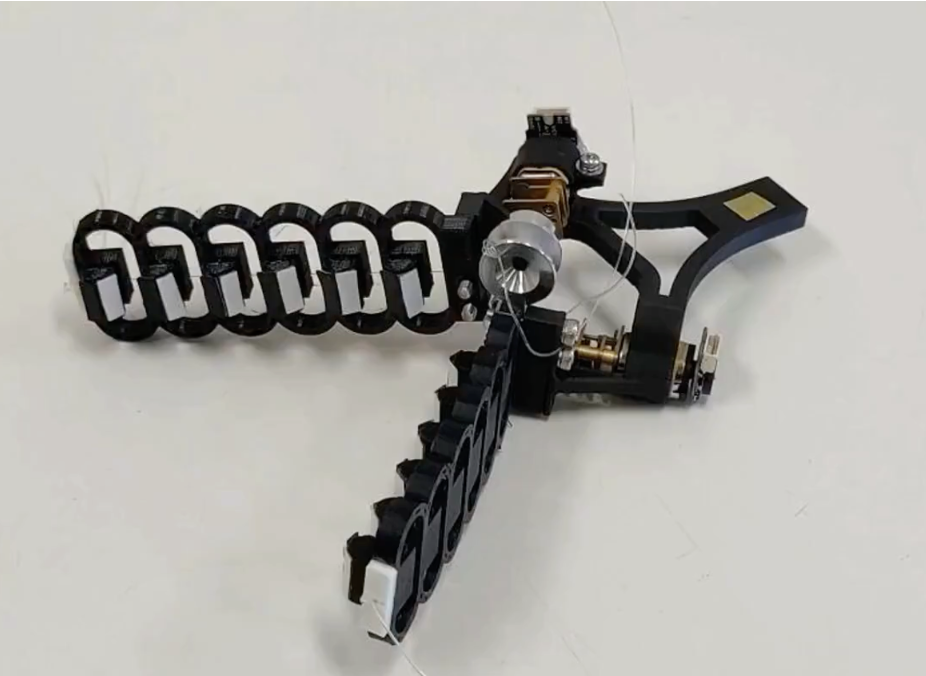
この研究は,大型イモムシの蠕動運動から着想を得た,新しいインハンドマニピュレーションの実現方法を提案したものです.この指は,従来の剛体と関節により設計されたものとは違い,圧縮変形と曲げ変形を同時に使うことによって,イモムシのように蠕動運動を生成します.このマルチモーダルな変形を利用することによって,このロボットハンドは,物体を把持しつつ回転させる,もしくは物体をはじしつつ移動させるといったインハンドマニピュレーションが実現できました.この指,特許も取得済みで信州大学 新技術説明会【オンライン開催】でも発表します.
どんなロボットか動画を見た方が早いと思うので,下記にYoutube動画を貼り付けておきました.
今年のIROSは京都で開催されます.是非,講演を聴きにきていただいて,活発な議論を交わしましょう!

