
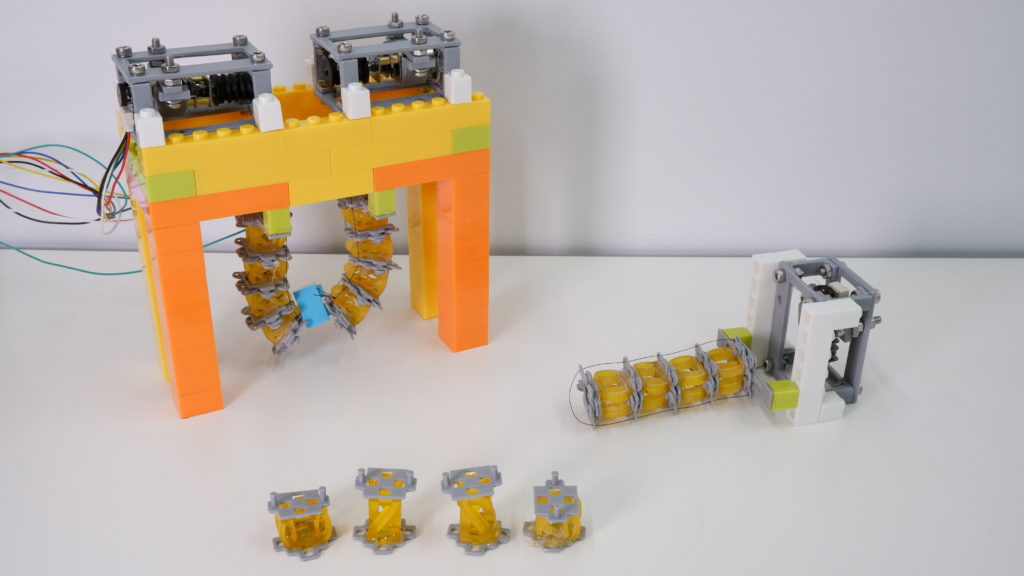
This research proposes a toy-block-like system that combines multiple modules that can easily undergo multiple deformations, such as bending, twisting, and compression, and tendon-drives them so that a user can freely design complex deformations at will. Mr. Naokazu Ohashi is taking the initiative in this research.
This research was presented at the following conferences:
The 26th IPSJ Symposium INTERACTION 2022, Interactive Presentation 2 [2022-02-28 14:50].
Title: "Reconfigurable Tendon-Driven Modular Soft Robot (2D-04)
Author: Naokazu Ohashi, Noriyasu Iwamoto, Takuya Umedate(Shinshu Univ.)
We received the Interactive Presentation Award!
- Digest movie of the research:
Please turn on the subtitle on Youtube or click here.
Please turn on the subtitle on Youtube or click here.