
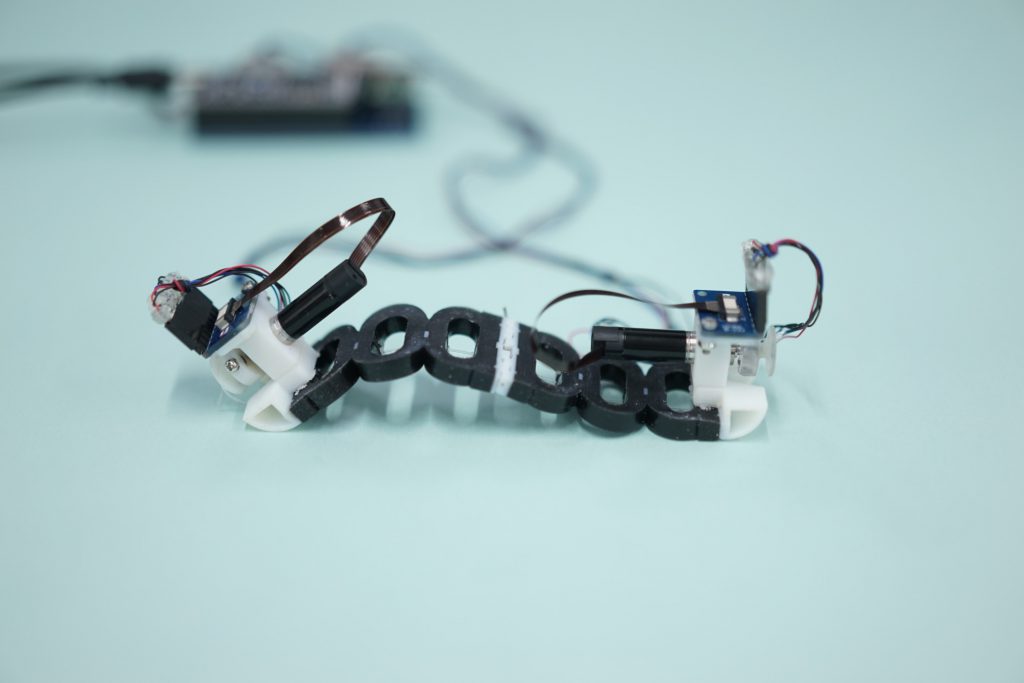
A significant yet underestimated feature of soft robotics is that we can simultaneously design functions using multiple deformation modes such as bending and compression. Observations of a biological caterpillar (silkworm moth larva, a skeletonless, fully metamorphic insect larva) show that it uses both bending and compressive deformation. Focusing on this biological knowledge, we designed the beam, the body of the soft robot, to be hollow so that bending and compressive deformation can coincide. The research demonstrates that the caterpillar robot that simultaneously uses these two modes of deformation can move faster than one that uses only bending deformation (RA-L, ICRA19). Furthermore, we also show that by changing the driving frequency of the robot, it produces mainly bending deformations (crawling), and at another frequency, it produces primarily compressive deformations (RoboSoft19).
This research has shown that by using multiple deformation modes simultaneously, rather than sticking to one deformation mode, diverse and functional behaviors can be achieved with a small number of actuators.
This research was conducted by Dr. Takuya Umedachi, the director of our laboratory, while he was working as a lecturer in Kawahara Laboratory, Graduate School of Information Science and Technology, The University of Tokyo. This research has been published in the following journals and international conferences:
- Crawling Robot using Both Compression and Bending Deformations, Takuya Umedachi, Masahiro Shimizu, Yoshihiro Kawahara, IEEE Robotics and Automation Letters, DOI: 10.1109/LRA.2019.2893438, 2019 (pdf)
- Actuation Frequency-Dependent Automatic Behavioral Switching on Caterpillar-Inspired Crawling Robot, Takuya Umedachi, Masahiro Shimizu, Yoshihiro Kawahara, 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft 2019), Paper MoPS.28, Soul, Korea, April 15, 2019 (pdf).