
Multicolor tilt detection marker to visualize deformation distribution
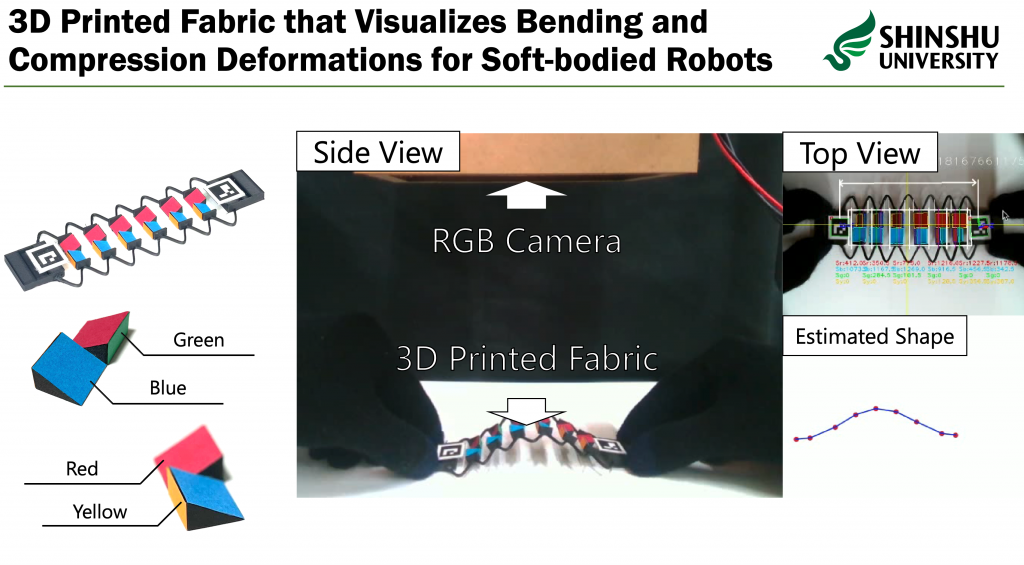
This study proposes a multicolor tilt-sensing marker and its measurement algorithm for measuring the shape and deformation of deformable curved surfaces such as cloth, living system surfaces, and soft robots. This method enables shape estimation of deformable curved surfaces (right photos) by simply attaching many multicolor tilt markers (left photo) to the deformable surface and photographing them with a monocular camera (center photo). Multicolor tilt-detection markers are 3D printed structures painted with multiple colors. The camera's image sensor detects the tilted angles of the markers based on the ratio of the color areas reflected by the markers. The information obtained from these marker images is stitched together using the OpenCV image processing library and the proposed algorithm. The system is designed to simultaneously measure bending deformation and compression/extension deformation. Experiments using the proposed markers in the real world have demonstrated that multimodal deformation distributions can be measured very easily with this method. The proposed method is helpful in measuring complex and rich multimodal deformations of flexible objects such as soft-bodied creatures, robots, and fabrics. As a further prospect, we plan to design a feedback control for a soft-bodied robot using the deformation information obtained by this method.
This research has been conducted mainly by Mr. Kohei Hanaoka.
Achievement
Measuring Motion of Deformed Surfaces for Soft-bodied Robots/Animals with Multi-colored Markers, K. Hanaoka, M. Shimizu, T. Umedachi, 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft2022), April 2022.
This research was presented in English by Mr. Hanaoka, a master's degree graduate from our laboratory, at RoboSoft2022 (The 5th IEEE International Conference on Soft Robotics). This video reproduces the English presentation of the conference:
Development of 3D Printed Structure that Visualizes Bending and Compression Deformations for Soft-bodied Robots, Hanaoka, Kohei (Shinshu University), Shimizu, Masahiro (Osaka University), Umedachi, Takuya (Shinshu University), RoboSoft2021, Poster Session 1, April 14, 2021.
This research was presented in English by Mr. Hanaoka, an M2 student (at this time) in our laboratory at RoboSoft2021 (The 4th IEEE International Conference on Soft Robotics). This video reproduces the English presentation of the conference: