

欧文科学誌Robomech Journalに吉川大喜さんの研究が採択決定
日本機械学会のロボティクス・メカトロ部門の欧文誌であるROBOMECH Journalに,当研究室に吉川大喜さんの研究の掲載されます.採択決定の知らせを先程受け取りました.ROBOMECH Journalは,Spring […]

梅舘准教授が国際学会AMAM2023にて基調公演
AMAM2023 (The 11th International Symposium on Adaptive Motion of Animals and Machines)という,生物学者と生物模倣ロボット学者が参加する […]

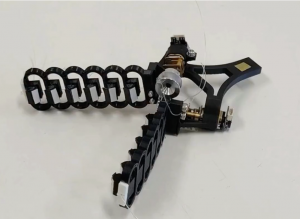
RoboSoft2023:堀岡 悠人さんが単一モータで駆動する双安定格子の変形波伝搬を利用したイモムシロボットを発表
当研究室でM1の堀岡 悠人さんの研究が,世界中のソフトロボット研究者が集う国際学会IEEE RoboSoft2023(The 6th IEEE-RAS International Conference on Soft R […]
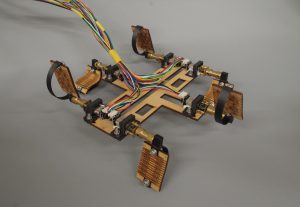
IROS2022:小野寺智哉さんがイモムシに着想を得たインハンドマニュピュレーション可能なソフトロボットハンドを発表
当研究室でM2の小野寺智哉さんの研究が,ロボット系ではトップカンファレンスのIROS2022(The 2022 IEEE/RSJ International Conference on Intelligent Robot […]
金子温志さんが国際学会Living Machines2022で口頭発表を行いました
2022年7月19-22日に開催された,生物系-ロボティクス系の分野横断型国際学会であるLiving Machines 2022(査読付き)にて,当研究室M2の金子温志さんの研究を発表しました.ヨーロッパ時間でのオンライ […]
Robomech2022にて啓輔さんと吉川大喜さんが発表しました
日本機械学会ロボティクス・メカトロニクス講演会2020(Robomech2022)にて,当研究室のM1の萱間啓輔さんと吉川大喜さんの研究成果を発表しました.オンラインとオンサイトの両方のハイブリット形式で行われましたが, […]
英科学雑誌Engineering Research Expressに我々の論文”Caterpillar-inspired soft robot that locomotes upside-down by utilizing environmental skeleton”が掲載されました.
イモムシは外部の枝などをあたかも自信の骨格のように扱うことで,枝から剥がれ落ちるのを防いでいます.柔軟なイモムシロボットにも,同じことやらせるには脚とボディをどの様に制御すればいいか?をれを明らかにした論文が出版されまし […]