
IROS2023:志村賢人さんが連続ジャンプ可能な双安定構造を持つテンセグリティを発表
当研究室の卒業生の志村賢人さんの研究が,ロボット系ではトップカンファレンスのIROS2023(The 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems)に採択され,学会にて口頭発表を行います.下記が発表情報にになります:
Bistable Tensegrity Robot with Jumping Repeatability Based on Rigid Plate-Shaped Compressors, Kento SHIMURA, Noriyasu IWAMOTO, Takuya UMEDACHI, The 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2023), DOI: TBA, 2023.
邦訳「連続ジャンプ可能な板状圧縮材を用いた双安定テンセグリティロボット」,志村賢人,岩本憲泰,梅舘拓也
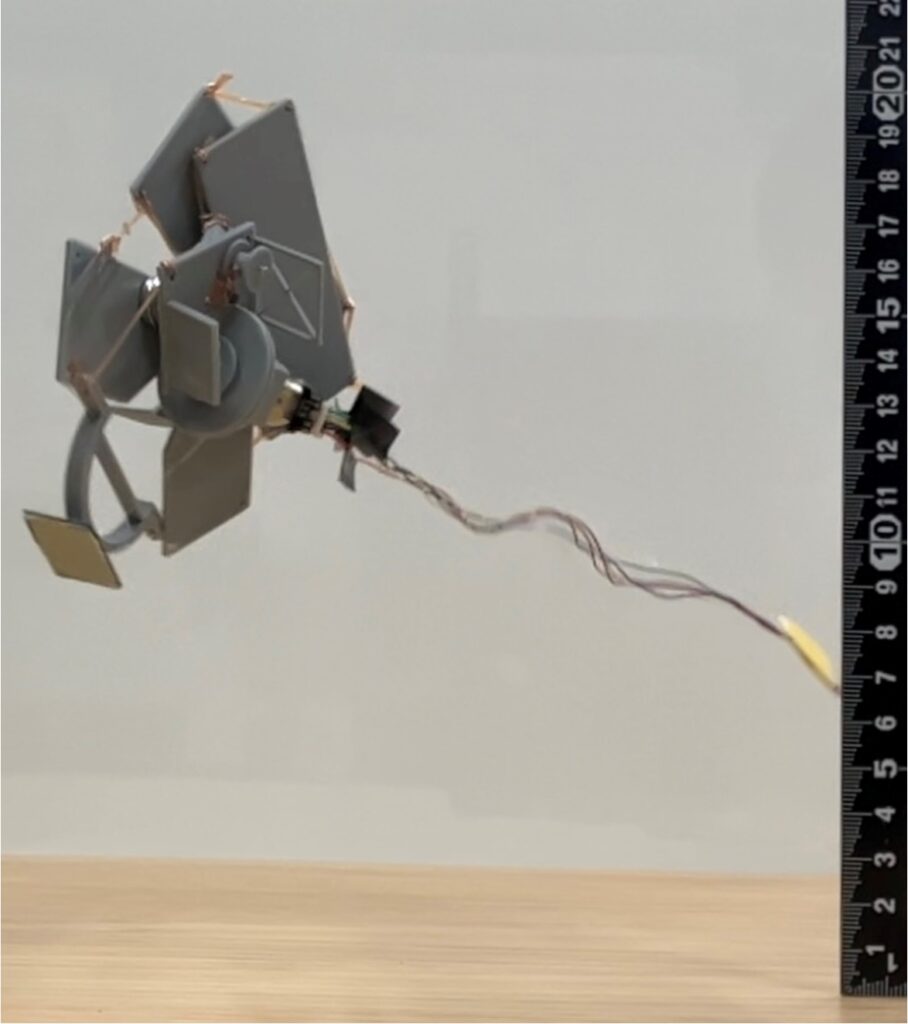
発表概要:本研究は,1つのモータで反復跳躍が可能な双安定テンセグリティロボットを提案します.このロボットは,剛性の高い板状の圧縮材を用いたテンセグリティ構造がベースになっています.双安定性を実現するために,圧縮材同士の衝突に起因する幾何学的制約を考慮した物理シミュレータを用いて,追加バネの位置を最適化することで双安定構造を設計しました.物理シミュレーションモデルに基づいてプロトタイプ(ロボット実機)を製作しました.連続ジャンプを実現するため,1つのモーターで3つの腱を制御し,それぞれの腱で追加バネのひずみを制御し,スナップスルー動作の引き金を引き,構造を元の形に戻せるように設計しました.ロボット実機は,スナップスルー動作を使ってジャンプし,モーターの力で再び元の形に戻ることができます.さらに,このロボット実機に,わずかな角度が付いたスタンド(アタッチメント)を取り付けるて連続ジャンプさせることで,階段を登っていくロコモーション能力があることを示した.
当研究のまとめページは現在作成中です.

“IROS2023:志村賢人さんが連続ジャンプ可能な双安定構造を持つテンセグリティを発表” に対して1件のコメントがあります。