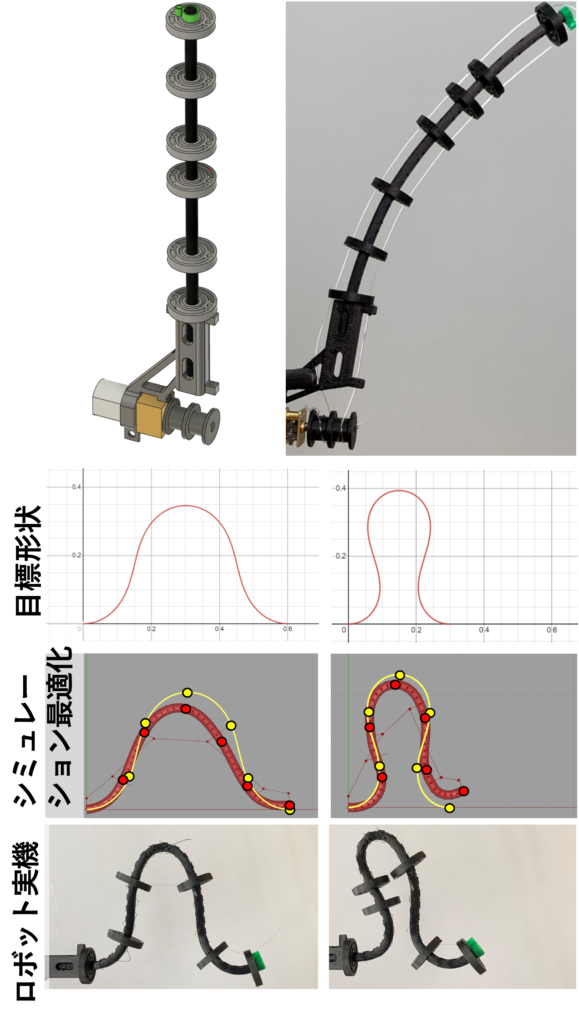
単一モータ駆動により,連続体ロボットを曲率分布のある複雑な形状に変形させる方法を提案しました.この連続体ロボットは,腱ガイドを適切な間隔で配置することにより,所望の形状に変形させることができる.目標とする形状として,クロソイド曲線,サイン曲線,曲率一定の円曲線を用い,変形後の形状がそれらと一致することをシミュレーションおよび試作機で確認しております.本論文では,連続体ロボットの2つのモデルを提案しました.1つは,腱がロッドに対して平行であるプレーンモデル,もう1つは腱がロッドに対して貫通しているペネトレーションモデルです.ペネトレーションモデルでは 貫通位置を配置することにより,この連続体ロボットは変曲点を持つ形状に変形することができます.この変形形状をシミュレートする数理モデルを設計し,遺伝的アルゴリズムを用いてガイドと貫通位置の適切な配置を求めました.この研究を使うことで,連続体ロボットや生体模倣ロボットのアクチュエータ数の削減や小型軽量化に応用できると考えられます.
本研究成果は,日本機械学会ロボティクス・メカトロニクス講演会2020(Robomech2022)にて,当研究室の吉川大喜さんが発表しました.また,Robomech Journalに採択され,近日掲載予定です.以下は,学会・学術誌掲載情報と,Robomech2022の発表を収録したYoutube動画は以下になります:
- A single motor-driven continuum robot that can be designed to deform into a complex shape with curvature distribution, Daiki Yoshikawa, Masahiro Shimizu, Takuya Umedachi, Robomech Journal, 2023 (accepted, preprint pdf).
- 曲率分布を自由に設計可能なワイヤ駆動型連続体ロボット,吉川大喜,清水正宏,梅舘拓也,ロボティクス・メカトロニクス講演会,2A1-S07,2022.
Robomech2022にて啓輔さんと吉川大喜さんが発表しました
日本機械学会ロボティクス・メカトロニクス講演会2020(Robomech2022)にて,当研究室のM1の萱間啓輔さんと吉川大喜さんの研究成果を発表しました.オンラインとオンサイト…