
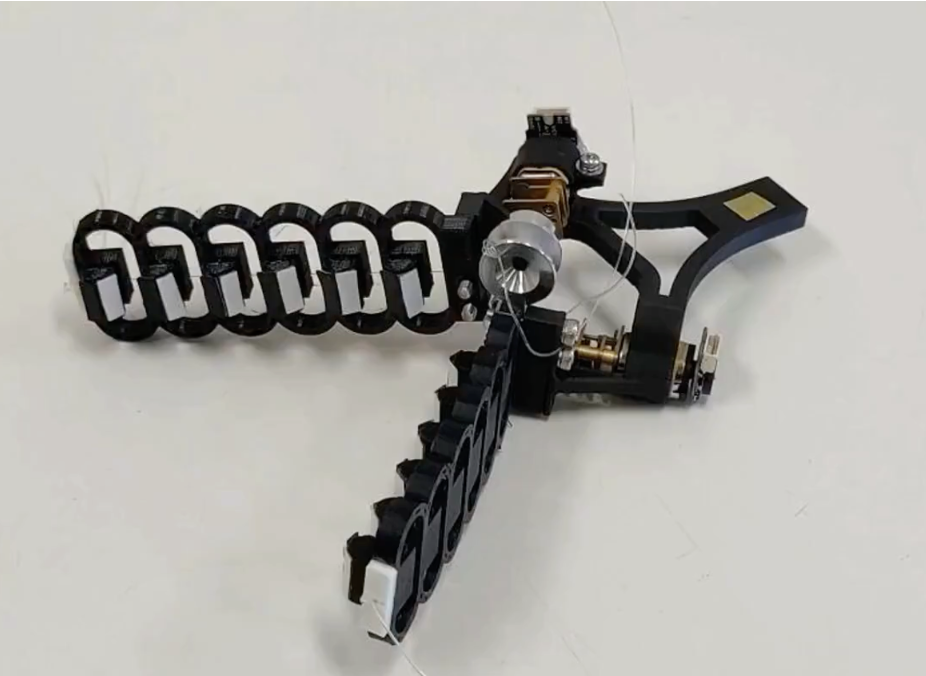
本研究では、大型イモムシの蠕動運動から着想を得た新しいインハンドマニピュレーションを実現しました.従来の剛体と関節によるロボット指との大きな違いは,指を柔軟材で作ることによりマルチモーダルな変形(圧縮と曲げ変形)を可能にし,そのマルチモーダルな変形を使って物を持ったまま,ハンド内で回転・移動を実現している点です.このソフトロボットハンドの設計の着想は,大型のイモムシが体の曲げ変形のみならず,体軸方向の伸縮を利用して這行運動を行う生物学的事実に基づいています.提案した2本のソフトロボット指からなるロボット実機にて,このマルチモーダルな変形を利用して,把持物体を把持した状態で,ハンド内で回転または移動できることを示しました.加えて,安定してインハンドマニピュレーションを行うためには,2指の蠕動運動に時間差が必要であることを示しました.このような柔軟指の設計により,ソフトロボットハンドの全く新しい様式でのインハンドマニュピュレーションが実現できることを示しました.
本研究は,当研究室の小野寺智哉さんが行なっています.本研究は下記学会で発表しました:
- In-hand Manipulation Exploiting Bending and Compression Deformations of Caterpillar-Locomotion-Inspired Fingers, Tomoya Onodera, Noriyasu Iwamoto, Takuya Umedachi, The 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2022), DOI: 10.1109/IROS47612.2022.9982281, 2022 (pdf).
- 蠕動運動する指による把持物体のハンドリングを目指したロボットハンド,小野寺智哉,梅舘拓也,ロボティクス・メカトロニクス講演会,2P1-F02,June 6-8, 2021.
- ヒントはイモムシ!インハンドマニピュレーション可能なソフトロボットハンド,信州大学 新技術説明会,2022年08月04日(木)開催.
特に,1番目のIROSという国際学会はロボティクス分野ではトップカンファレンスで,そこで発表した内容に編集を加えた発表動画とPV動画をYoutubeに公開しました:
さらに,日本語用の資料として2022年08月04日(木)開催 JST 信州大学 新技術説明会で発表した様子を記録したYoutubeをご覧ください: