
2024年度卒業研究発表会で研究成果を発表
2025年3月12日(木)に梅舘研の学部4年生の稲葉 悠馬さん,今元 寛文さん,北野 佑典さんの1年間の研究成果を,信州大学繊維学部機械・ロボット学科コース機能機械学コース卒業研究発表会にて発表しました.この研究内容は,日本機械学会ロボティクスメカトロニクス講演会2025 (Robomech2025)で発表いたします.デモ機も持っていく予定なので,是非,講演会に参加される方は,お立ち寄り下さい.
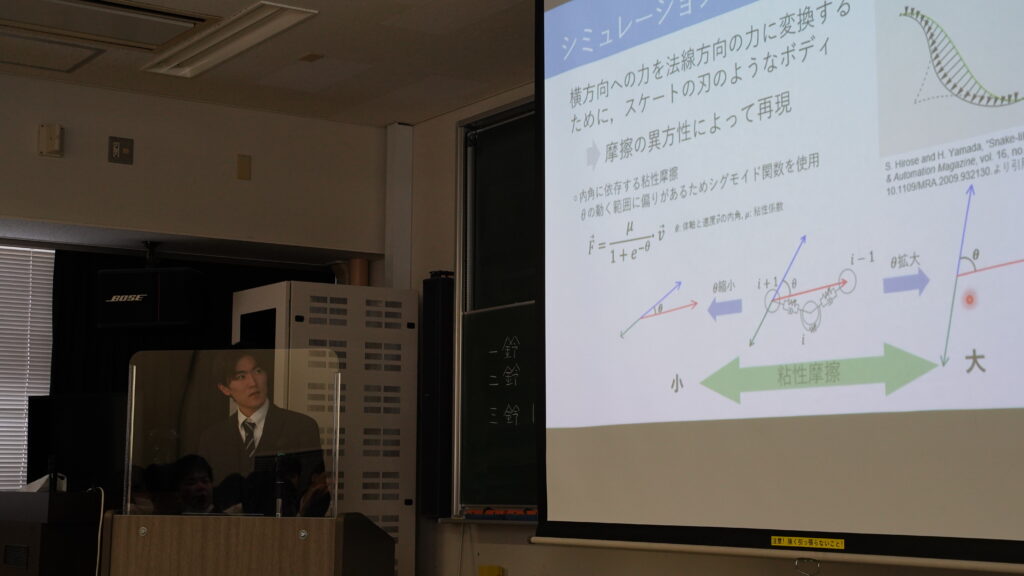
伸縮運動により斜め横に這行を行うヘビ型ロボット

発表者:稲葉 悠馬さん
概要
本研究では,従来の曲げ運動に加えて伸縮運動を導入することで,新たな移動様式を持つヘビ型ロボットを開発しました.シミュレーションを用いて運動特性を解析し,伸縮運動の振幅および位相差を制御することで,斜め横方向への移動が可能であることを確認しました.さらに,シミュレーション結果に基づき,試作機の設計を行っています.本研究の成果は,生物模倣ロボティクスにおける新たな移動戦略の提案となり,柔軟な環境適応性を備えたロボット開発につながることが期待されます.
Robomech2025でのタイトル情報など
- 伸縮運動により斜め横に這行するヘビ型ロボットの開発,稲葉 悠馬,梅舘 拓也,ロボティクス・メカトロニクス講演会2025,4-7, June, 2025.
把持物体の形状に応じたソフトロボットハンドの骨格設計


発表者:今元 寛文さん
概要
本研究では,生物が骨格を生成する時に使われている反応拡散方程式を用いて,把持物体の形状に応じたソフトロボットハンドの自律的骨格設計を行いました.ソフトロボットは,その柔軟性ゆえに外部環境への適応能力が高い一方で,重量物の把持時に適切な支持構造を持たないことが課題となります.本研究では,把持物の形状に適応して変形する骨格を設計し,コンプライアンス性を維持しながら、抗重力性・抗外力性を向上させることを目的としました.シミュレーションにて,計上の異なる把持対象物との物理的な相互作用を通じて,把持形状に応じた骨格が生成されることが確認できました.
Robomech2025でのタイトル情報など
- 反応拡散方程式を用いた把持物の形状に応じたロボットハンドの自律的骨格設計,今元 寛文,大森 祥輔,岩本 憲泰,梅舘 拓也,ロボティクス・メカトロニクス講演会2025,4-7, June, 2025.
3Dプリンタで印刷した引張硬さ可変機素の開発

発表者:北野 佑典さん
概要
本研究では,3Dプリンタを用いて製造可能な引張硬さ可変機素を開発しました.TPU(熱可塑性ポリウレタン)を素材とし,可変幅Wを操作することで,構造の主要な変形モードを曲げ変形から伸び変形へと移行させるメカニズムを構築しました.この手法により,引張硬さの調整が可能であることを実験とシミュレーションを通じて確認しました.本研究の成果は,ロボットの柔軟性を向上させるソフトロボティクスや,コンプライアントメカニズムの新たな設計指針として応用が期待されます.今後は,小型化やモーターによる制御機構の導入を進め,実用化を目指します.
Robomech2025でのタイトル情報など
- 3Dプリンタで造形可能な引張硬さ可変機素の開発,北野 佑典,梅舘 拓也,ロボティクス・メカトロニクス講演会2025,4-7, June, 2025.

