英文学術雑誌 JRMに吉川 大喜さんの研究が掲載

英文学術雑誌 Journal of Robotics and Mechatronics (JRM)に,当研究室のOBの吉川 大喜さんの研究「少数アクチュエータで駆動する連続体ロボットの複雑な変形設計」の掲載されました.オープンアクセスで,こちらからPDFと提出動画を見ることが出来ます.以下,掲載情報になります:
- Complex Deformation Design of Continuum Robot Driven by Few Actuators with Optimized Tendon Path, Daiki Yoshikawa, Noriyasu Iwamoto, Takuya Umedachi, Special Issue on Robotics and Mechatronics Technology for Snake-Like and Hyper-Redundant Robots, Journal of Robotics and Mechatronics (JRM), 36(6): 1369-1377, Published on September 18, 2024, DOI: https://doi.org/10.20965/jrm.2024.p1369. (PDF link, open access)
「少数アクチュエータで駆動する連続体ロボットの複雑な変形設計」の要約
本研究では,少数のアクチュエータで駆動する連続体ロボットの三次元変形設計手法を提案しました.腱駆動式ロボットのガイド配置を遺伝的アルゴリズムで最適化することで,曲率分布を制御し,従来の一定曲率モデルでは実現できない多様な動作を可能にします.本論文では,腱の配置モデルとして「平面モデル」と「貫通モデル」を導入し,これらを組み合わせることで複雑な三次元変形を実現しました.
提案手法の検証のため,数値シミュレーションを用いて最適なガイド配置を算出し,その結果を基にプロトタイプを製作・実験しました.最適化されたロボットは,事前最適化モデルと比較して動作の多様性と操作性が向上し,少ないアクチュエータで高機能な変形が可能であることを示しました.本研究の成果は,医療や探索,組み立て作業など,多様な分野での連続体ロボットの活用に貢献することが期待されます.
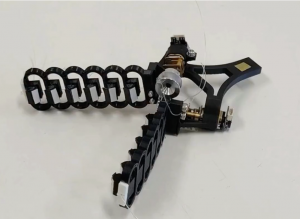
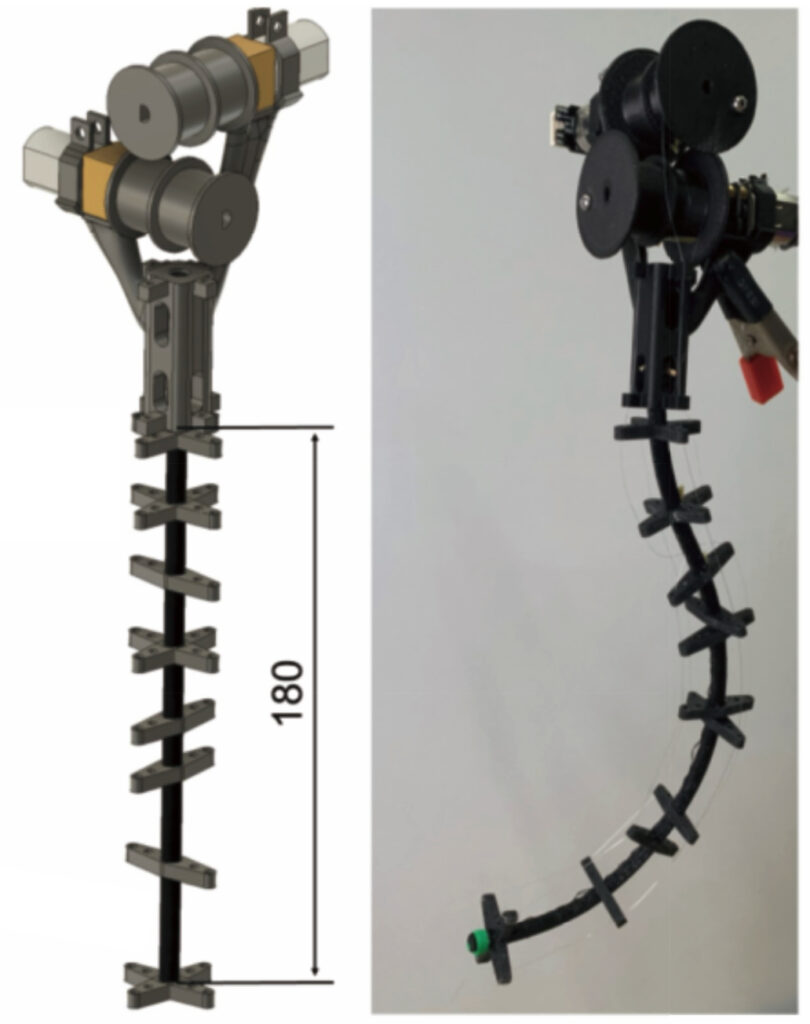
左がCAD図(数値はmm),右図は実機